Aplikasi Fotodioda Sebagai Kendali Pada Robot Mobil Line Follower
1. Dasar Teori [kembali]
Robot Line Follower (LF) merupakan robot yang dapat mengikuti garis, biasanya garis hitam dengan background putih. Terdapat duq jenis robot Line Folower yaitu LF analog dan LF digital. Perbedaannya yaitu pada LF analog tidak menggunakan mikrokontroler untuk pengendaliaanya, sedankan LF digital menggunakan mikrokontroler sebagai pengendaliannya. Nah untuk sekarang saya akan membahas mengenai Robot Line Follower Analog dengan menggunakan Fotodioda sebagai sensor dan LM24 sebagai IC komparator. Untuk lebih jelasnya baca penjelasan berikut ini.
A. Prinsip Kerja Sensor
Sensor yang digunakan terdiri dari photo dioda. Sensor ini nilai resistansinya akan berkurang bila terkena cahaya dan bekerja pada kondisi riverse bias. Untuk sensor cahayanya digunakan LED Superbright, komponen ini mempunyai cahaya yang sangat terang, sehingga cukup untuk mensuplai cahaya ke photo dioda.

Gambar Rangkaian sensor
Cara kerjanya :
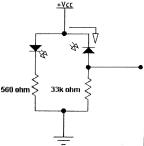
Gambar Sensor tidak terkena cahaya
Jika photo dioda tidak terkena cahaya, maka nilai resistansinya akan besar atau dapat kita asumsikan tak hingga. Sehingga arus yang mengalir pada komparator sangat kecil atau dapat diasumsikan dengan logika 0.

Gambar Sensor terkena cahaya
Jika photo dioda terkena cahaya, maka photo dioda akan bersifat sebagai sumber tegangan dan nilai resistansinya akan menjadi kecil, sehingga akan ada arus yang mengalir ke komparator dan berlogika 1.
B. Prinsip Kerja Komparator
Komparator pada rangaian ini menggunakan IC LM 324 yang didalamnya berisi rangkaian Op Amp digunakan untuk membandingkan input dari sensor. Dimana input akan dibandingkan dari Op Amp IC LM 324 yang output berpulsa high. Sehingga tidak perlu adanya pull up pada outputnya. IC ini dapat bekerja pad range 3 volt sampai 30 volt dan dapat bekerja dengan normal mulai tegangan 6 volt.
Dalam rangkaian ini juga terdapat 4 LED, yang berfungsi sebagai indikator. Untuk mengatur tagangan pada pembanding, disambungkan Variable Resistor (VR) diantara kedua OP Amp IC LM 324. Untuk datasheet LM324 silakan unduh disini.
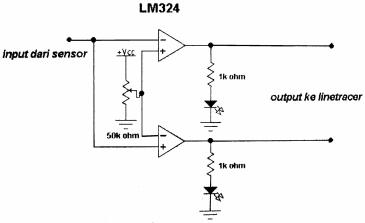
Gambar Rangkaian komparator
? Jika tidak ada arus yang mengalir dari rangkaian sensor ke rangkaian ini maka tegangan masukan untuk rangkaian ini adalah 0 Volt, akibatnya pada IC 1 tegangan di terminal ( + ) > ( – ), maka LED-A on, sedangkan pada IC 2 sebaliknya LED-B off.
? Jika ada arus yang mengalir dari rangkaian sensor ke rangkaian ini maka tegangan masukan untuk rangkaian ini mendekati Vcc, akibatnya pada IC 2 tegangan di terminal ( + ) < ( – ), maka LED-B on, sedangkan pada IC 1 sebaliknya maka LED-A off.
Kondisi antara titik A dan B akan selalu keterbalikan.
C. Prinsip Kerja Driver Motor
Driver adalah rangkaian yang tersusun dari transistor yang digunakan untuk menggerakkan motor DC. Dimana komponen utamanya adalah transistor yang dipasang sesuai karakteristiknya.
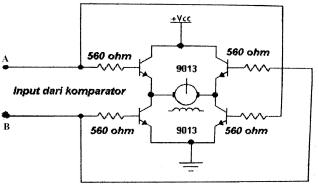
Gambar Rangkaian driver H-Bridge Transistor
Pada saat input A berlogika 1, maka ada arus yang mengalir pada rangkaian, akibatnya transistor 1 dan 4 on karena basis terbias, sehingga motor berputar. Sehingga saat input A berlogika 1 maka input B akan berlogika 0, jadi transistor 2 dan 3 akan off.
Pada saat input B berlogika 1, maka ada arus yang mengalir pada rangkaian, akibatnya transistor 2 dan 3 on karena basis terbias, sehingga motor berputar tapi dengan arah yang berlawanan.
2. Rangkaian Simulasi [kembali]

Gambar Rangkaian Skematik Robot Line Follower
Prinsip Kerja Rangkaian :
Pada rangkaian di atas tedapat IC LM24 sebagai komparator, kmudian Fotodioda sebagai sensor, LED sebagai sumber cahaya dan indikator, selanjutnya yaitu Driver motor L239D sebagai pengendali motornya.
Sama-sama kita ketahui fotodioda merupakan tahanan variabel yang nilai resistansinya dipengaruhi oleh cahaya. Ketika LED menyentuh bidang bewarna putih maka bidang tersebut akan memantulkan cahaya ke fotodioda yang menyebabkan nilai resistansi pada fotodioda bernilai kecil, karena fotodioda dihubungkan dengan kaki 2(-) IC LM324, maka tegangan yang masuk ke kaki 2 (-) LM324 menjadi lebih kecil dari tegangan pada kaki 3(+) LM324 (V3 > V2) sedangkan pada kaki komparator lainnya tegangan referensinya teletak pada kaki 2 dan tegangan fotodioda pada kaki 3, sehingga V2 > V3, dimana tegangan referensi yang sudah kita atur sebelumnya. Berdasarkan kondisi tersebut maka LM324_A akan meghasilkan logika 1 (High) yang diteruskan ke kaki IN 1 driver motor L293D, sedangkan LM324_B menghasilkan logika 0 (LOW), sehingga motor bergerak searah jarum jam.
untuk lebih jelasnya perhatikan gambar berikut.

Gambar Rangkaian Skematik Robot Line Follower
Gambar diatas merupakan kondisi ketika LED menyentuh bidang putih, bagaimana ketika LED menyentuh bidang warna HITAM?? untuk menjawab pertanyaan tersebut coba perhatikan gambar dibawah ini.

Gambar Rangkaian Skematik Robot Line Follower
Asumsikan LED yang bewarna hitam merupakan kondisi dimana LED menyentuh bidang hitam, pada gambar diatas terlihat bahwa tegangan pada kaki 2 komparator (V2) lebih besar dari tegangan pada kaki 3 komparator (V2 > V3), atau bisa kita buat bahwa V- > V+ pada kaki komparator LM324_A sehingga outputnya sama dengan 0. Sedangkan pada LM324_B terjadi kebalikannya yang menghasilkan tegangan outputnya sama dengan 1. Dengan kondisi tersebut mengakibatkan motor berputar berawanan arah jarum jam, karena kaki IN2 pada driver motor mendapat logika 1, sedangkan kaki IN1 mendapat logika 0.
Dengan penjelasan diatas maka kita dapat memetakan arah kendali dari robot mobil (Line Follower) yang akan dibuat.

Tabel Kontrol Robot Mobil dengan sensor Fotodioda terhadap bidang yang disentuh LED
Tabel diatas memperlihatkan pengaruh bidang yang disentuh LED terhadap arah pergerakan robot mobil. Perlu diingat bahwa setiap LED mempengaruhi sensor Fotodioda yang berada didekatnya, dalam hal ini asumsikkan LED1 mempengaruhi sensor fotodioda 1 dan LED 2 memepengaruhi sensor fotodioda 2.

Gambar Rangkaian Skematik Robot Line Follower
3. VIDIO [kembali]
4. LINK DOWNLOAD [kembali]
-Rangkaian Schematic DOWNLOAD
-HTML DOWNLOAD